
Файл:Feature Detection and Tracking by Mars Helicopter.png
{kind=link}
{kind=link}
Исходный файл (1464 × 549 пкс, размер файла: 581 КБ, MIME-тип: image/png)
Описание
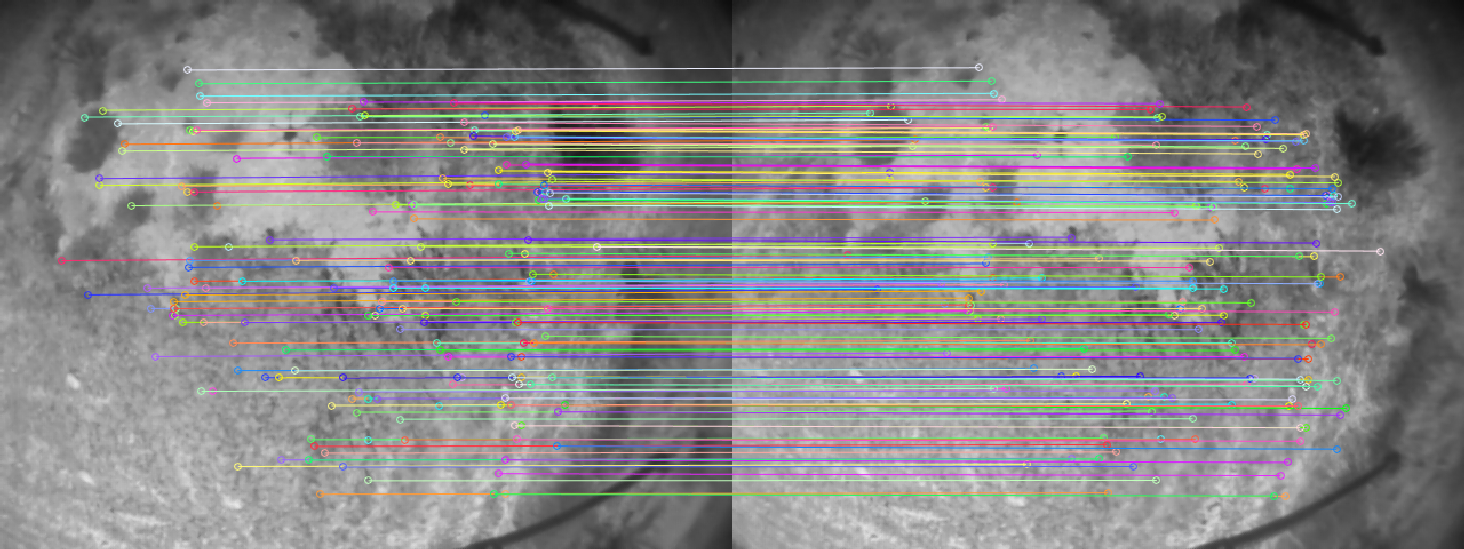
| Описание | The MAVeN navigation algorithm used has no absolute references to any landmarks. It always operates against a base frame where it sees a bunch of features and tracks them over a limited set of search frames. When it’s done, it requires a completely new base frame. It is always tracking in a relative sense, never tied back to a global frame.
MAVeN is implemented as an Extended Kalman Filter (EKF) that also uses the difference between the predicted and measured LRF range. MAVeN has a state vector with seven components: position, velocity, attitude, IMU accelerometer bias, IMU gyro bias, base image position and base image attitude, for a total of 21 scalar components. MAVeN only tracks features between the current search image and the base image. Because the base frame is frequently reset as the features are lost, MAVeN is effectively a long-line visual odometry algorithm: the relative position and attitude between the two images are measured, but not the absolute position and attitude… The two main disadvantages of MAVeN are sensitivity to rough terrain, due to the ground-plane assumption, and long-term drift in position and heading. For Ingenuity technology demonstration phase, this is an acceptable tradeoff, because accuracy degradation is graceful and the algorithm has proven to be highly robust in both simulations and experiments. |
|---|---|
| Источник | https://www.avinc.com/images/uploads/news/IUS_Ingenuity.pdf |
| Время создания | 2021-06-01 |
| Автор или правообладатель | NASA/JPL-CalTech — Лицензия: Public domain (в общественном достоянии) |
| Другие версии файла | — |
Источник файла — сайт Wikimedia Commons, куда он был загружен под одной из свободных лицензий ( https://commons.wikimedia.org/wiki/File:Feature_Detection_and_Tracking_by_Mars_Helicopter.png ). Авторов, работавших над этим файлом см. в истории файла: https://commons.wikimedia.org/w/index.php?title=File:Feature_Detection_and_Tracking_by_Mars_Helicopter.png&action=history
{kind=link}
{kind=link}
В общем случае в статьях энциклопедии Руниверсалис файлы используются в соответствии со статьёй 1274 Гражданского кодекса Российской Федерации.
История файла
Нажмите на дату/время, чтобы увидеть версию файла от того времени.
| Дата/время | Миниатюра | Размеры | Участник | Примечание | |
|---|---|---|---|---|---|
| текущий | 00:37, 10 октября 2023 | 1464 × 549 (581 КБ) | I, Robot (обсуждение | вклад) | == Описание == {{Изображение | описание = The MAVeN navigation algorithm used has no absolute references to any landmarks. It always operates against a base frame where it sees a bunch of features and tracks them over a limited set of search frames. When it’s done, it requires a completely new base frame. It is always tracking in a relative sense, never tied back to a global frame. <p>MAVeN is implemented as an Extended Kalman Filter (EKF) that also uses the difference between the predicted... |
Вы не можете перезаписать этот файл.
Использование файла
Следующий файл является дубликатом этого файла (подробности):
{kind=link}
- Файл:Feature Detection and Tracking by Mars Helicopter.png на общем хранилище
Следующая страница использует этот файл:
{kind=link}